

Grupa naučnika s prestižnog Departamana za informatiku Univerziteta u Cirihu predstavila je jedinstvenu platformu koja će služiti razvijanju agilnih autonomnih letova koje izvode roboti. Platforma „Agilicous“ je spoj softvera otvorenog koda (open source) i „otvorenog“ hardvera (open hardware) koji će olakšati naučnicima širom svijeta da pristupe projektu i doprinesu njegovom razvoju. Zahvaljujući intenzivnom istraživanju i zahtjevnim eksperimentima koji su sprovođeni i u zatvorenom i u otvorenom prostoru, 11 naučnika na čelu s Filipom Fenom (Philipp Foehn) i Eliom Kaufman (Elia Kaufmann) uspjelo je da razvije platformu pomoću koje leteći roboti mogu izvoditi agilne autonomne letove brzine do 70 km/h i s ubrzanjem do 5g.
U radu „Agilicious: Open-source and open-hardware agile quadrotor for vision-based flight“, koji je nedavno objavljen u prestižnom žurnalu ScienceRobotics, Fen i grupa autora ističu da autonomni agilni letovi kvadrotora (quadrotor), tj. robota s četiri propelera, predstavljaju izazov za istraživanja u oblasti robotike i to posebno u kontekstu percepcije, planiranja, učenja i kontrole. Zahtjevni agilni autonomni letovi, poput spasilačkih i izviđačkih misija, predstavljaju oblast koju je potrebno dalje usavršavati. Let dronom kojim upravlja čovjek još uvijek je standard u ovim situacijama, a naučnici s Univerziteta u Cirihu žele da doprinesu razvoju agilni letova koje će roboti obavljati autonomno i to bolje od pilota.

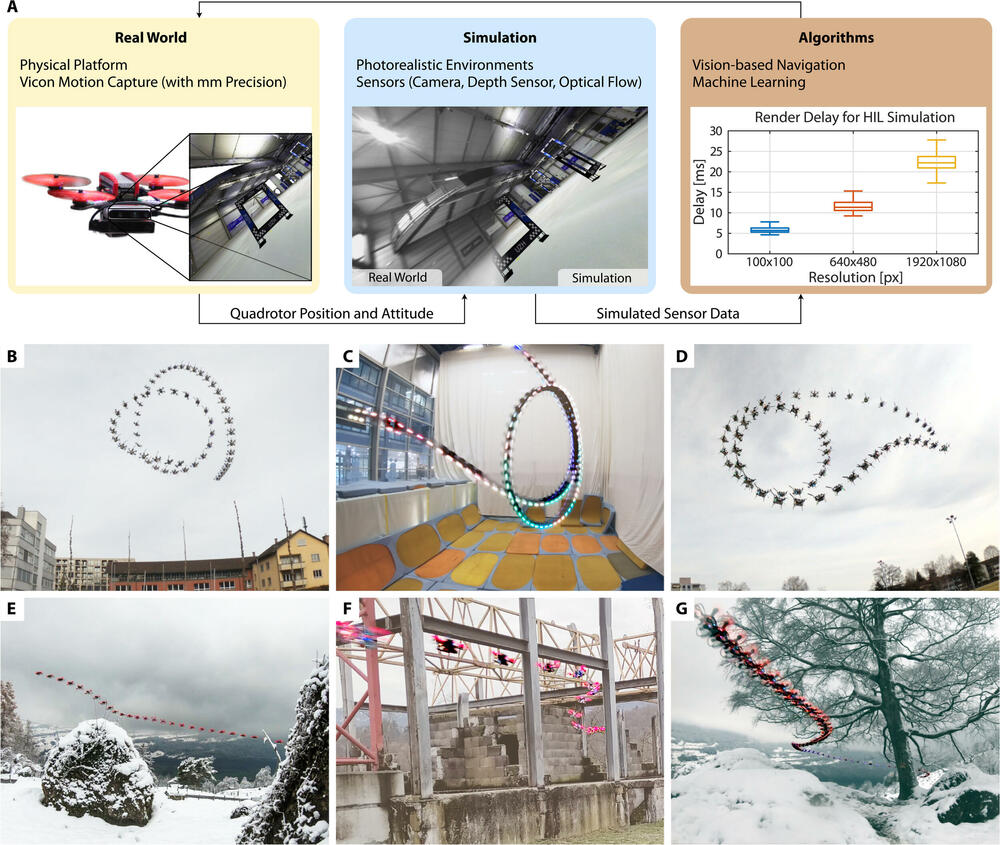
Da bi autonomni letovi bili savršeni i da bi dronovi mogli da lete između brojnih prepreka velikom brzinom, potrebno je da budu opremljeni adekvatnim hardverom i softverom. Dodatni izazov ovdje predstavlja činjenica da se prilikom odabira hardvera koji će biti „mozak“ autonomne letilice mora voditi računa da se napravi najbolji mogući balans između moći računanja (computational power) i težine hardvera. Naime, veća moć računanja najčešće zahtijeva i veći i teži uređaj koji će imati super-brzi procesor za obradu podataka, a težina uređaja negativno utiče na agilnost autonomne letjelice. Osim hardvera, potreban je i dobar softver, tj. algoritam na osnovu kojeg će autonomna letjelica analizirati svoje okruženje i donositi odluke o svom kretanju.

Da bi dobili najbolje iz dva svijeta, naučnici s Univerziteta u Cirihu su za probnu letilicu odabrali super-lagani okvir Armattan Chameleon 6, koji predstavlja „kostur“ drona (težine svega 86 grama), motor Xrotor 2306 (110 g), četiri propelera tipa Azure Power SFP 5148 (20 g) i moćni mikro-računar NVIDIA Jetson TX2 (154 g). Kada se na to sve dodaju ostali djelovi i baterija, dobije se autonomna letilica težine 590 grama. Što se tiče softvera, istraživači su se ovdje opredijelili za razvoj sopstvenog softvera otvorenog koda (open source) koji, za razliku od trenutnih alternativa, nudi mogućnost lakog re-programiranja, slobodnog pristupa, kao i preciznije računanje. Spoj ovog hardvera i softvera nazvan je „Agilicious“.
Istraživači su testirali ovu platformu u seriji ekspiremenata koji su izvedeni u laboratoriji i na otvorenom. Dronovi su letjeli kroz zadatu rutu u zatvorenom prostoru brzinama do 60km/h i ubrzanjem do 4g, a njihova preciznost upoređivana je s onom koja se dobije kada dronom upravljaju profesionalni piloti. U otvorenom prostoru, grupa dronova izvodila je akrobatske letove oslanjajući se samo na svoje senzore. Rezultati dobijeni u ovim eksperimentima pokazali su da je autonoman, precizan i agilan let robota moguć i to pri jako velikim brzinama i u složenim okruženjima. Platforma koju su razvili ovi naučnici pokazala je veliku preciznost i odličan rezultat u poređenju s letilicama kojima su upravljali profesionalci.
Iako vrlo inspirativno, istraživanje svakako predstavlja samo prvi korak u jednoj veoma složenoj oblasti robotike. Autori istraživanja su na kraju istakli da se nadaju da će se uskoro promijeniti stanje u kojem su piloti još uvijek bolji od autonomnih letilica, te da će autonomne letove ubuduće možda izvoditi i veoma lagane autonomne letilice promjenljivog oblika (poznate i kao letilice dinamične morfologije).
Pogledajte još:
Preuzmi aplikaciju i prati vijesti

